Der Einsatz von Virtual Reality in der Ingenieurgeodäsie
 Abbildung 1: Das Messobjekt ist der Bogen Nr. 9 des Aquädukts Liesing im 23. Wiener Gemeindebezirk
Abbildung 1: Das Messobjekt ist der Bogen Nr. 9 des Aquädukts Liesing im 23. Wiener Gemeindebezirk
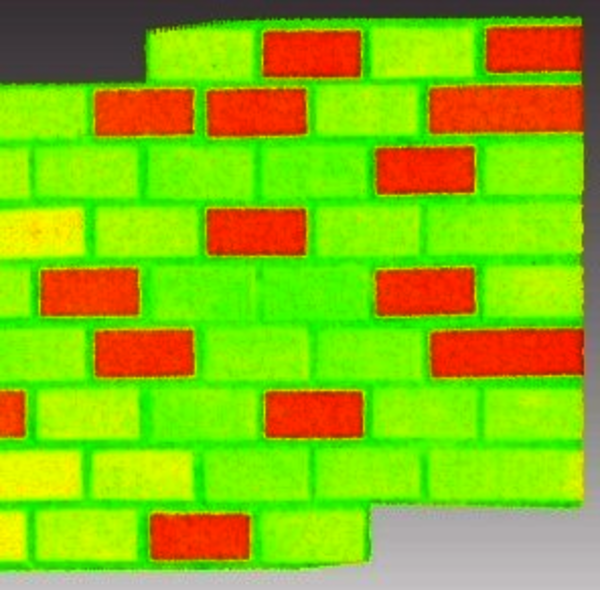
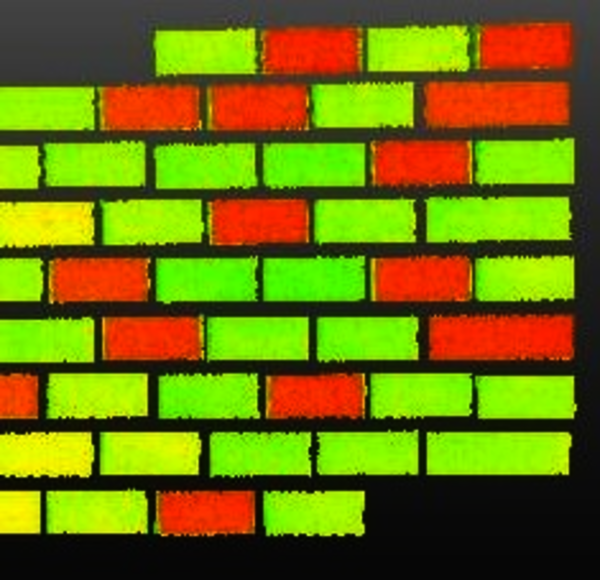 Abbildung 2: Ausschnitt eines Scans vor (oben) und nach der Segmentierung (unten)
Abbildung 2: Ausschnitt eines Scans vor (oben) und nach der Segmentierung (unten)
![Plot zeigt eine 2D-Kartenansicht mit X [m] von 1,5 bis 6 und Z [m] von ca. 3,1 bis 3,5. Hintergrund in Blau mit orangefarbenen Rechtecken. 30 Punkte (1–30) sind als stabil (offener Kreis) oder instabil (gefüllter Kreis) markiert; Legende oben.](/fileadmin/_processed_/0/1/csm_Results_UnsegPW_EpochVgl_300_bd74d36961.png)
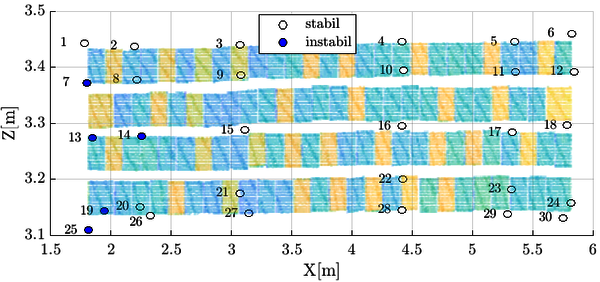 Abbildungen 3: Beispiel eines Ergebnisses des Epochenvergleichs auf Basis der geschätzten Kontrollpunkte, (oben) ohne vorhergehende Segmentierung, (unten) mit vorhergehender Segmentierung
Abbildungen 3: Beispiel eines Ergebnisses des Epochenvergleichs auf Basis der geschätzten Kontrollpunkte, (oben) ohne vorhergehende Segmentierung, (unten) mit vorhergehender Segmentierung
Raumkontinuierliche Modellierung von Deformationen einer Mauerwerkstruktur unter Berücksichtigung des Einflusses der geometrischen Objektstruktur.
In der Ingenieurgeodäsie erfährt der Bereich der Überwachungsmessung durch den Einsatz des terrestrischen Laserscannings (TLS) einen Wandel von einer punktbasierten zu einer flächenhaften Fragestellung. Im Vergleich zum klassischen punktbasierten Verfahren der Deformationsanalyse geht das Scannen ganzer Objektoberflächen oft mit der Steigerung messtechnischer Effizienz sowie dem erhöhten geometrischen Detailgrad einher. Dies stellt einerseits großes Potenzial in der Entwicklung von Überwachungsmessungen dar, fordert jedoch gleichzeitig die Bewältigung einiger fundamentaler Herausforderungen. Dazu zählt u. a. die fehlende Reproduzierbarkeit der gemessenen Punkte in zwei Scans der gleichen Szene. Ein Weg, diese herzustellen, ist die Modellierung der gescannten Oberflächen, um auf der Basis zugeordneter Flächenparameter oder Flächenstrukturen Aussagen über auftretende Deformationen zu treffen. Die vollständige Beschreibung des stochastischen Modells einer Punktwolke stellt eine weitere wesentliche Herausforderung dar.
In diesem Beitrag wird ein Methodenstrang zur Herleitung und Beurteilung flächenhafter Deformationen auf Basis real gemessener Daten vorgestellt. Der Fokus liegt dabei auf der Untersuchung des Einflusses geometrisch regelmäßiger Strukturen der Messobjekte auf die Modellierung der Punktwolken durch kontinuierliche Flächen sowie auf daraus abgeleitete Deformationen.
Messkampagne
Als Datengrundlage für die Methodenentwicklung wurde im Zuge einer eintägigen Messkampagne ein Teilbereich des Bogens Nr. 9 des Aquädukts Liesing (23. Wiener Gemeindebezirk), der die regelmäßige Struktur einer Klinkerfassade aufweist, in vier Epochen gescannt (siehe Abbildung 1). Der Standpunkt ist über alle Messepochen hinweg konstant geblieben und wurde durch lokale Netzmessungen auf seine Stabilität kontrolliert. Ziel der zeitlich engen Epochenfolge war die Untersuchung von Deformationen aufgrund des Temperaturverlaufes, der am Messtag eine Variationsbreite von 10°C überschritten hat. Im Zuge der Auswertung wurde die Punktwolke aus der ersten Epoche als Referenz definiert und jeweils mit den drei Punktwolken der Folgeepochen verglichen.
Modellierungsmethode und Problemformulierung
Zur Modellierung der gescannten Punktwolken werden approximierende B-Spline-Flächen verwendet. Diese sind Freiformflächen, die über Lokalitätseigenschaften verfügen. In der Approximation einer Punktwolke wird jedem gemessenen Punkt ein Punkt auf der geschätzten Fläche, durch die Zuweisung gemeinsamer Flächenparameter, zugeordnet. Eine B-Spline-Fläche wird durch ein Netz von Kontrollpunkten aufgespannt. Eine Deformation der B-Spline-Fläche in einem bestimmten Bereich äußert sich in einer Verschiebung derjenigen Kontrollpunkte, die an der Definition der Fläche in diesem Bereich beteiligt sind. Im Umkehrschluss gilt auch, dass eine lokal beschränkte Änderung der Kontrollpunkte eine lokale Änderung in der B-Spline-Fläche bewirkt. Diese Eigenschaft ist für die Überwachung räumlich abgegrenzter Deformationen eines gescannten Objekts sehr vorteilhaft.
Die approximierenden B-Spline-Flächen stellen kontinuierliche Flächen dar. Es gilt daher, die Auswirkung der diskontinuierlichen Objektstruktur, die durch den Klinkerverbau gegeben ist und sich direkt in den Scans widerspiegelt, auf die Approximationsgüte zu untersuchen. Dazu werden mit Hilfe einer Segmentierung Diskontinuitäten in den Punktwolken eliminiert und die Ergebnisse der Deformationsanalyse unter Verwendung segmentierter sowie unsegmentierter Punktwolken gegenübergestellt.
Entwickelter Lösungsansatz
Der entwickelte Lösungsansatz lässt sich in zwei Abschnitte strukturieren. Zunächst wird eine automatisierte Segmentierung der Punktwolken mit dem Ziel durchgeführt, die Messpunkte in den Fugen zu eliminieren. Hierfür wird eine initiale Segmentierungslösung, die auf Basis eines Region-Growing-Ansatzes generiert wird, unter Hinzunahme von Vorinformation der Klinkermaße und -orientierung optimiert.
Im Anschluss daran wird die Approximation mittels B-Spline-Flächen sowohl für die unsegmentierte als auch für die segmentierte Punktwolke vorgenommen und auf deren Basis jeweils eine Deformationsaussage getroffen. Der Direktvergleich der Ergebnisse lässt den Schluss auf den Einfluss der Struktur zu.
Die Approximation der zu vergleichenden Punktwolken durch B-Spline-Flächen passiert getrennt voneinander – ist jedoch methodisch analog. Die Modellformulierung erfolgt in einem Gauß-Markov-Modell (GMM), wobei die Beobachtungen die Koordinatenkomponenten der Einzelpunkte einer Punktwolke und die zu schätzenden Parameter die Koordinatenkomponenten der Kontrollpunkte sind. Als stochastisches Modell der Beobachtungen wird die Einheitsmatrix angesetzt. Eine initiale Approximation des Scans der Referenzepoche legt die Parametrisierung der B-Spline-Fläche fest, was im geodätischen Sinne einer Datumsfestlegung entspricht.
Diese Parametrisierung wird für die Vergleichsepoche beibehalten. Die Approximation eines Scans ist dann abgeschlossen, wenn im Globaltest der stattfindenden Ausgleichung die Nullhypothese (Identität der a priori und a posteriori Varianz der Gewichtseinheit) nicht verworfen werden kann. Dies wird durch die iterative Adaption des stochastischen Modells der Beobachtungen anhand der maximalen standardisierten Verbesserungen erreicht. Im Anschluss an die getrennte Modellierung aus zwei Epochen wird der Globaltest der Deformationsanalyse in der expliziten Hypothesenformulierung (Identität der Koordinaten in den zwei Epochen) ausgeführt. Eine Lokalisierung der instabilen Kontrollpunkte erfolgt, bei Verwerfung der Nullhypothese des Globaltests, mit der Methode der Klaffungszerlegung nach Gauß.
Resultate
In Abb. 3 sind zwei Ergebnisse des Epochenvergleiches auf Basis der Kontrollpunkte für einen gescannten Teilbereich des Bogens dargestellt. Die Punktwolken sind nach Intensitätswerten gefärbt und die Kontrollpunkte der geschätzten Fläche der Referenzepoche von 1 bis 30 nummeriert. Jene, blau markierten werden als signifikant verschoben angezeigt. Sowohl unter Einführung der unsegmentierten als auch der segmentierten Punktwolken werden fünf Kontrollpunkte als verschoben lokalisiert.
Eine genauere Betrachtung der verschobenen Kontrollpunkte zeigt, dass die Beträge der x- bzw. z-Komponenten der Koordinatendifferenzen signifikant unterschiedlich sind. Das Mess- und Auswerteverfahren ist in genau diesen Richtungen nicht sensitiv auf Änderungen. Gleichzeitig kann in den Randbereichen festgestellt werden, dass die Approximationsgüte der B-Spline-Flächen im Vergleich zum Inneren der Fläche wesentlich geringer ist, was ebenfalls Einfluss auf die Deformationsaussage haben kann. Schließlich ist zu berücksichtigen, dass im Globaltest der Deformationsanalyse die vollbesetzte Kovarianzmatrix der Kontrollpunkte eingeht. Darin enthaltene Korrelationen zwischen Kontrollpunkten sind mathematischer Natur und resultieren aus der Ausgleichung der B-Spline-Flächen. Physikalische Korrelationen zwischen den Messpunkten bleiben durch Verwendung der Einheitsmatrix unberücksichtigt, was ebenfalls eine Auswirkung auf den Ausgang des Globaltests haben kann.
Fazit
Dieser Beitrag beschreibt erste Untersuchungen in einem neuen Ansatz zur raumkontinuierlichen Deformationsanalyse basierend auf B-Spline-Flächen. Der Vorteil hierbei besteht in der Rückführung der flächenhaften Modellierung auf eine punktbasierte Fragestellung nach der interepochalen Stabilität der geschätzten Kontrollpunkte. Dies erlaubt eine Übernahme der Auswertekette der punktbasierten Deformationsanalyse. Dadurch wird eine statistisch begründete Beurteilung der Ergebnisse möglich.
Aus den vorgestellten Ergebnissen der Methodenentwicklung ergeben sich eine Fülle von Erkenntnissen und Schlüssen für eine zukünftige Weiterbearbeitung. Die Beschreibung des vollständigen stochastischen Modells einer Punktwolke stellt dabei einen zentralen Aspekt dar. Dessen Einfluss auf die Deformationsaussage basierend auf den Kontrollpunkten der Fläche ist entscheidend. Unter Verwendung des vorgestellten gescannten Teilbereichs des Aquäduktbogens konnte kein direkter Einfluss der Objektstruktur auf das Deformationsergebnis durch eine vorhergehende Segmentierung festgestellt werden. Dieser Aspekt wird zukünftig durch die Verarbeitung von Scans größerer Teilbereiche bzw. des gesamten Bogens weiter untersucht.
Dipl.-Ing. Elisabeth Ötsch, Bsc
Prof. Dr.-Ing. Hans Neuner
Forschungsbereich Ingenieurgeodäsie, Technische Universität Wien
>> Weitere Projekte des Instituts