Der Einsatz von Virtual Reality in der Ingenieurgeodäsie
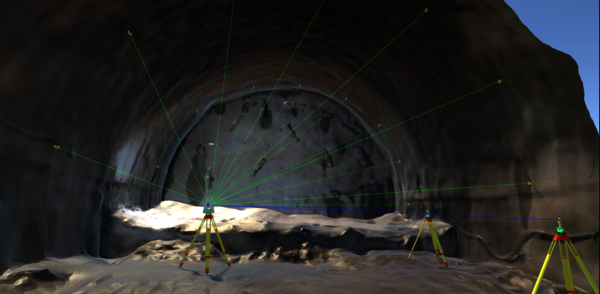 Abbildung 1: Virtuelle Messplanung untertage
Abbildung 1: Virtuelle Messplanung untertage
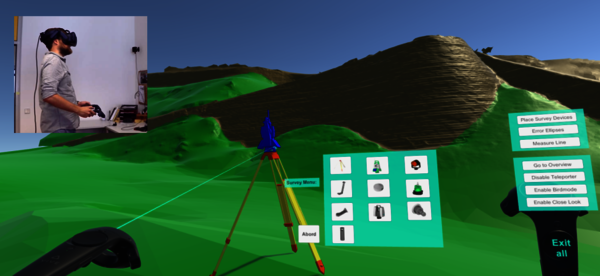 Abbildung 2: Setzen einer Totalstation mit dem virtuellen Planungstool
Abbildung 2: Setzen einer Totalstation mit dem virtuellen Planungstool
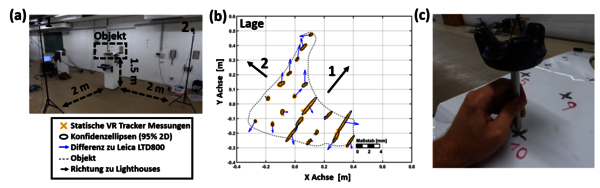 Abbildung 3: Laborversuch mit Karosserieteil (a) Messkonfiguration, (b) horizontale Abweichungen, (c) VR VR-Tracker mit Messspitze.
Abbildung 3: Laborversuch mit Karosserieteil (a) Messkonfiguration, (b) horizontale Abweichungen, (c) VR VR-Tracker mit Messspitze.
Der Einsatz von Virtual Reality in der Ingenieurgeodäsie wird künftig zu einem Standard werden, dessen Potential weit über die reine Visualisierung hinausreicht.
Die weite Verbreitung von Laserscannern, die vermehrte Nachfrage nach der Implementierung von BIM-Konzepten und die teilweise sehr detaillierte Ausführungsplanung von Bauprojekten haben zu einem enormen Anstieg an 3D-Datengrundlagen im geodätischen Umfeld gesorgt. Damit auch in Zukunft diese immer komplexer werdenden 3D-Daten zufriedenstellend in geodätische Software eingebunden werden können, sind neue Bedienungskonzepte und Zugänge erforderlich.
Ein breiter Fundus an Konzepten zum Umgang und zur Interaktion mit 3D-Welten ist aber schon jetzt in der Unterhaltsindustrie zu finden. Es importieren bereits viele Disziplinen Konzepte und Werkzeuge aus der Welt der Videospiele und adaptieren sie für komplexe technische Fragestellungen. Dieser Prozess wird als Gamification bezeichnet.
Vor allem die Virtual Reality (VR) ermöglicht dem Benutzer einen einfachen Zugang zu komplexen 3D-Sachverhalten. Dabei trägt der Nutzer den Bildschirm direkt am Kopf und überträgt die Bewegung über ein Positionierungssystem direkt in die virtuelle Simulation. Damit kann der Benutzer die Simulation in der „Ich“-Perspektive erleben und bekommt ähnliche Eindrücke von der Umgebung als wäre er direkt vor Ort.
VR als Planungstool in 3D-Umgebungen
Eine Verwendungsmöglichkeit, an der zurzeit an der TU Graz geforscht wird, ist die Erstellung einer VR-Applikation zur Planung von geodätischen Messungen (siehe Abb.1). Die Baustelle kann basierend auf Modellen aus Laserscandaten virtuell besichtigt werden und die Messplanung kann direkt am detailgetreuen 3D-Modell erfolgen. Ein Vorteil dieser Methode ist, dass auch 3D-Modelle aus der Planung eingebunden werden können und so eine Aussage getroffen werden kann, noch bevor der Grundstein gelegt ist.
In der Simulation kann sich der Benutzer frei im Modell bewegen und auf eine Auswahl an vordefinierter Vermessungsausrüstung zurückgreifen. Diese kann an Ort und Stelle platzieren werden, ähnlich wie auch der erfahrene Geodät in einer realen Umgebung agieren würde.
Die Vermessungsausrüstung kann über die Auswahl in einem Katalog über einen Laserpointer im Modell verortet werden (siehe Abb.2). Dies ermöglicht bereits in der Planungsphase einen hohen Detailgrad durch die 3D-Modellierung, denn das platzierte Objekt interagiert mit dem 3D-Modell und den bereits vorhandenen Objekten. So passen sich die Beine des Statives dem Gelände an, die Auslenkung der Gelenke der Konsole wird entsprechend angepasst oder das Prisma wird optimal auf die Totalstationen ausgerichtet. Somit kann bereits über die richtige Montagevorrichtung für die Ausrüstung entschieden werden, ob die Dimensionen der Komponenten zu Beeinträchtigungen der Baustelle führen, aber auch bereits die optimale Orientierung von Prismen berechnet werden.
Für die Beziehung zwischen Totalstation und Prisma können beim Setzen der Totalstationen diese mit einsehbaren Prismen verbunden werden. Die Visuren werden daraufhin automatisch geprüft, ob sie den implementierten Rahmenbedingungen entsprechen. Der Benutzer bekommt direkt nach dem Setzen ein Feedback über etwaige Probleme mit der Konfiguration und kann seine Platzierung entsprechend adaptieren. Hier werden zum Beispiel Beeinträchtigungen des Visurstrahls, Einfallswinkel ins Prisma oder multiple Ziele im Feinanzielungskegel abgefragt. Auch Visuren zwischen Standpunkten sind möglich, um Polygonzüge und Netzmessungen abzubilden.
Als Basis für diese geodätische VR-Simulation dienen 3D-Modelle des Vermessungszubehörs. Für die Abbildung der Funktionalität werden diese mit Attributen aus den Datenblättern bzw. aus Laborversuchen versehen.
Hier wäre auch, nach der Definition eines standardisierten Austauschformats, das Importieren von Produktkatalogen unterschiedlicher Hersteller möglich. Das Einbinden von funktionalen 3D-Modellen mit Attributen in eine Game-Engine ist aber eine Problemstellung, die bereits von BIM-Anwendungen bekannt ist. Hier sei an dieser Stelle an die Lösungsansätze aus diesem Bereich verwiesen.
Ein weiterer Punkt, der nicht zu vernachlässigen ist, ist das optische Erscheinungsbild. Für Architekten und Anrainer ist es wichtig, dass sich die Installationen in das Stadt- bzw. Gebäudebild einfügen. Daher muss die Stabilisierung auch auf ästhetische Gesichtspunkte hin optimiert werden. Hier schafft auch eine 3D-Repräsentation der geplanten Installationen im besten Fall Verständnis, aber zumindest eine Diskussionsgrundlage.
VR-System als Messsystem
Für das immersive Erlebnis des Benutzers muss die Position aller VR-Komponenten zu jeder Zeit bekannt sein. Ein VR-System mit 6 Freiheitsgraden ist daher auch im erweiterten Sinne immer ein 3D-Indoor-Positionierungssystem.
Im Messlabor des Instituts für Ingenieurgeodäsie und Messsysteme (IGMS) der TU Graz wurde die Positionsgenauigkeit des VR-System HTC Vive Pro untersucht und auf eine Eignung als 3D-Koordinatenmessmaschine überprüft. Die Laboruntersuchungen zeigten systematische Effekte in der Positionslösung wie Driften, Positionssprünge, eine verkippte horizontale Referenzebene und rotationsabhängige Effekte bei den Komponenten im Ausmaß von mehreren Zentimetern. Es zeigte sich aber in einer optimalen Konfiguration eine vielversprechende relative Wiederholbarkeit der Ergebnisse im Bereich weniger Millimeter.
Deshalb wurde das System in einem Anwendungsbeispiel bei der Vermessung eines Karosserieteils getestet. Unter Berücksichtigung der aufgedeckten Systematiken in den Laborversuchen wurde das Setup angepasst, um ein optimales Ergebnis zu erzielen. Die Ergebnisse wurden mit einem Leica LTD 800 Lasertracker verifiziert.
In Abbildung 3a ist zu sehen, wie das Karosserieteil in 2 m Entfernung zu jeder Basisstation auf einem Messpfeiler in einer Höhe von 1,5 m fixiert wurde. Ein Peripheriegerät des VR-Systems, der VR-Tracker, wurde mit einer Messspitze ausgerüstet und bildetet damit von der Handhabung her eine Analogie zur Probe des Lasertrackers (siehe Abb. 3c).
Jeder Messpunkt besteht aus 500 Einzelmessung, welche über mehrere Sekunden gemittelt wurden, da im statischen Anwendungsfall mit einer höheren Genauigkeit des Systems zu rechnen ist. Die Bewegung des VR-Trackers während dieser Messzeit wurde über die mitaufgezeichneten Drehwinkel des Systems korrigiert.
Die Messungen wurden drei Mal wiederholt und bei allen drei Messreihen wurde eine Koordinatenabweichung zum Laser-Tracker unter 3 mm erreicht (siehe Abb.3b). Somit wurden in diesem Beispiel Genauigkeiten erreicht, die auch typischen Genauigkeiten von Totalstationsmessungen mit 360°-Prismen entsprechen.
Das Experiment wurde hier in einem kleinen Maßstab und unter einigen Einschränkungen vorgenommen. Auch entspricht die erreichte Genauigkeit noch nicht den Anforderungen einer Industrieanwendung, aber es zeigt auch, dass diese low-cost-Systeme in einen Bereich vordringen, der für geodätische Anwendungen in Zukunft interessant werden könnte.
Fazit
VR-Systeme haben längst den Videospiel-Markt verlassen und sich in vielen technischen Bereichen bereits etabliert. Auch in der Geodäsie werden VR-Systeme in der Zukunft zu einem Standard-Werkzeug werden, deren Potential weit über die reine Visualisierung hinausreicht.
Dipl.-Ing. Peter Bauer
Engineering Geodesy and Measurement Systems, Graz University of Technology
>> Mehr Informationen zum Projekt