Fahrziel Nachhaltigkeit
 Der autonome Kompostwender ist mit zahlreicher Sensorik ausgestattet. Die beiden GNSS-Antennen und der GNSS-Empfänger, die inertiale Messeinheit und die Inkrementalgeber der Ketten werden zur hochgenauen Positionierung verwendet. Mithilfe des LiDARs nimmt der Kompostwender seine Umgebung wahr.
Der autonome Kompostwender ist mit zahlreicher Sensorik ausgestattet. Die beiden GNSS-Antennen und der GNSS-Empfänger, die inertiale Messeinheit und die Inkrementalgeber der Ketten werden zur hochgenauen Positionierung verwendet. Mithilfe des LiDARs nimmt der Kompostwender seine Umgebung wahr.
 Kompostmieten auf einer gewerblichen Kompostieranlage.
Kompostmieten auf einer gewerblichen Kompostieranlage.
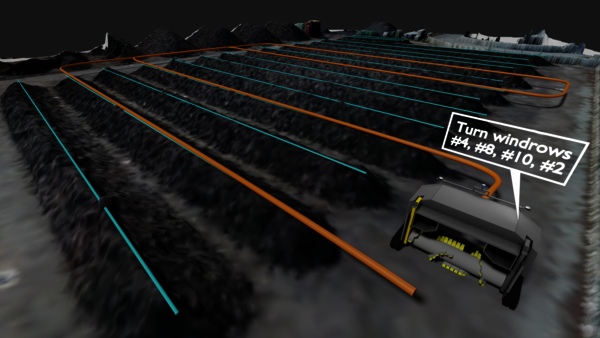 Die Routen für den Kompostwender.
Die Routen für den Kompostwender.
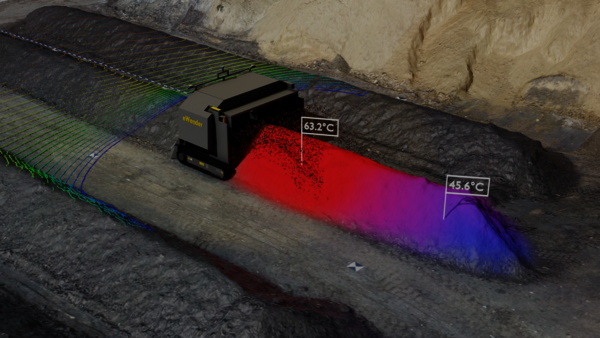 Der Kompostwender misst während des Wendevorgangs die Temperatur der Kompostmiete mit und schickt die gemessenen Werte in ein Datenmanagementsystem.
Der Kompostwender misst während des Wendevorgangs die Temperatur der Kompostmiete mit und schickt die gemessenen Werte in ein Datenmanagementsystem.
Warum ein Kompostwender ein Navi braucht.
„Woran forschst du? Was bitte ist denn ein Kompostwender?“ Die meisten Gesprächspartner sehen mich verblüfft an, wenn ich darüber berichte, dass wir uns an der TU Graz im Fachbereich Geodäsie seit mehreren Jahren mit autonom fahrenden Kompostwendern beschäftigen. Warum diese Thematik jedoch hochrelevant ist, was genau ein Kompostwender ist und wie man ein Navigationssystem für einen Kompostwender entwickelt, werden Sie in diesem Artikel erfahren.
Die steigende Nachfrage nach Recycling
In den letzten 20 Jahren ist die Menge an Bioabfällen, die in Europa recycelt werden, ständig gestiegen. Seit 2020, als die Europäische Kommission einen neuen Aktionsplan für die Kreislaufwirtschaft in Europa vorstellte, gibt es einen starken politischen Willen für mehr Recycling. In der Richtlinie für Abfälle wurden ambitionierte Ziele gesteckt: Bis 2035 sollen mindestens 65 % der Siedlungsabfälle in der EU wiederverwendet oder recycelt werden. Bioabfälle machen derzeit 34 % der Siedlungsabfälle in der EU aus (van der Linden und Reichel, 2020). Um die EU-Ziele erreichen zu können, spielt das Recycling von Bioabfällen damit eine Schlüsselrolle. Bioabfälle können durch Kompostierung und durch Gärung recycelt werden. 90 % der separat gesammelten Bioabfälle in der EU werden kompostiert (Razza et al., 2018).
Die Rolle des Kompostwenders
Die gängigste Form der gewerblichen Kompostierung ist die Mietenkompostierung, bei der das zu kompostierende Material in langen, dreieckigen Kompostzeilen, sogenannten Mieten, aufgeschüttet wird. Diese Mieten müssen regelmäßig mit Kompostwendern gewendet werden, um das Material zu durchmischen und ausreichend zu belüften. Herkömmliche Kompostwender sind dieselgetriebene Maschinen mit einer großen Walze. Das Bedienpersonal sitzt direkt auf dem Kompostwender und ist während des Wendevorgangs hohen Temperaturen, Vibrationen, Dämpfen, Gasen und unangenehmen Gerüchen ausgesetzt.
Automatisierung
Um die steigenden Mengen an Bioabfällen zu kompostieren und um angenehmere Arbeitsbedingungen für die Mitarbeiter von Kompostieranlagen zu schaffen, muss die Kompostierung automatisiert werden. Seit mehreren Jahren forschen wir in einem interdisziplinären Team aus LogistikerInnen und NavigationsexpertInnen genau an dieser Thematik. In den von der FFG geförderten Forschungsprojekten ANTON und ANDREA entwickeln wir an der TU Graz gemeinsam mit der Otto-von-Guericke-Universität Magdeburg und mit zwei österreichischen Firmen einen autonom fahrenden, elektrisch angetriebenen Kompostwender, der die Kompostierung revolutionieren soll.
Der smarte Kompostwender
Für einen autonom fahrenden Kompostwender sind mehrere Faktoren wichtig: Erstens muss er wissen, welche Mieten er wenden muss und wie die optimale Route durch diese Mieten verläuft. Zweitens muss er seine Position hochgenau kennen, damit die notwendigen Steuerbefehle berechnet werden können, um ihn auf die optimale Route zu bringen. Drittens muss er Hindernissen ausweichen können. Zusätzlich wäre es praktisch, wenn er wichtige Parameter wie Temperatur oder Feuchtigkeit misst und in ein Datenmanagementsystem einspeist.
Routenplanung
Wenn Sie von Wien nach Linz fahren möchten, geben Sie Start- und Zielpunkt in Ihr Navigationssystem ein und bekommen die optimale Route angezeigt. Dahinter steckt ein Routingalgorithmus, der, basierend auf einem digitalen Graphen, welcher die Straßen als Wegenetz abbildet, eine Kostenfunktion minimiert und Ihnen so z. B. die schnellste, kürzeste oder die umweltfreundlichste Route anzeigt. Vorausgesetzt wird, dass der Straßengraph aktuell ist. Hier haben wir schon die erste Herausforderung, wenn wir die optimale Route für unseren autonomen Kompostwender berechnen möchten: Die Lage der Mieten auf der Kompostieranlage, die quasi die Straßen für den Kompostwender sind, verändert sich ständig. Wie können wir sicherstellen, dass wir immer ein aktuelles Lagebild der Mieten haben? Hierfür verwenden wir einen LiDAR (Light Detection And Ranging) Sensor, der direkt am Kompostwender montiert ist. Der Kompostwender wird um die Kompostieranlage gesteuert und scannt die Mieten. Mithilfe der genau bestimmten Position und Ausrichtung des Kompostwenders können die einzelnen Scans direkt georeferenziert und zu einer globalen Punktwolke zusammengeführt werden. Aus dieser Punktwolke wird pro Miete eine Linie geschätzt, welche die optimale Route für den Kompostwender durch die Miete repräsentiert.
Positionsbestimmung & Hindernisdetektion
Wenn der Kompostwender autonom fahren soll, ist es essenziell, dass wir seine Position und Ausrichtung hochgenau bestimmen können. Um dabei robust und ausfallssicher zu sein, verwenden wir ein Multi-Sensor-System: einen RTK-fähigen GNSS-Empfänger mit zwei GNSS-Antennen, eine inertiale Messeinheit und die Inkrementalgeber, die die Umdrehungen der Motoren, die die Ketten des Kompostwenders antreiben, messen. Die Daten fusionieren wir in Echtzeit mit einem Error-State Extended Kalman Filter. Da Kompostwender als kettengetriebene Fahrzeuge andere Fahreigenschaften haben als z. B. Traktoren, haben wir ein eigenes Odometriemodell entwickelt, das unter anderem auch den Schlupf der Ketten berücksichtigt. Wir konnten zeigen, dass mithilfe dieses Modells auch längere GNSS-Ausfälle gut überbrückt werden können.
Ein autonomer Kompostwender sollte Hindernisse erkennen und ihnen ausweichen können. Für eine Hindernisdetektion, die bei Tag und Nacht funktioniert, verwenden wir einen LiDAR-Sensor.
Datenmanagement
Laut der österreichischen Kompostverordnung muss in der gewerblichen Kompostierung die Temperatur der Mieten regelmäßig gemessen und dokumentiert werden. Im Projekt ANDREA wird daher untersucht, wie der autonome Kompostwender die Temperatur der Miete beim Wendevorgang mitmessen und automatisch in ein Datenmanagementmodell einspeisen kann.
Zusammenfassung und Ausblick
Um die steigenden Mengen an Bioabfällen effizient kompostieren zu können, wird in zwei Forschungsprojekten an autonom fahrenden Kompostwendern geforscht. Die Arbeitsgruppe für Navigation des Instituts für Geodäsie an der TU Graz hat ein Navigationssystem für den autonom fahrenden Kompostwender entwickelt. Aus LiDAR-Daten werden automatisch die optimalen Routen berechnet und Hindernisse erkannt, ein Multi-Sensor-Positionierungssystem bestimmt die Position und Ausrichtung der Maschine hochgenau. Zusätzlich misst der Kompostwender die Temperaturen der Mieten und speist diese in ein Datenmanagementmodell ein. In Zukunft soll der Kompostwender noch smarter werden und auch mit anderen Maschinen auf der Kompostieranlage kommunizieren.
Forschung im Bereich der Multi-Sensor-Positionierung ist einer der Schwerpunkte an der Arbeitsgruppe für Navigation am Institut für Geodäsie. Darüber hinaus beschäftigt sich die Gruppe mit den Themen der robusten und präzisen Positionierung durch Globale Navigationssatellitensysteme (GNSS) und der Verwendung von Satellitenkommunikationssignalen (z. B. Starlinksignale) als Signals-of-Opportunity. Ebenfalls forscht die Gruppe an der Detektion, Klassifizierung und Lokalisierung von GNSS-Interferenzen sowie an deren Gegenmaßnahmen. Weitere Themen sind Software-basierte Empfänger, Signalgenerierung und -design sowie innovative Positionierungsmethoden unter Verwendung von Artificial Intelligence-Ansätzen. Die Arbeitsgruppe verfügt über ein GNSS- & Navigationslabor, um neue Positionierungs- und Navigationsverfahren entwickeln und testen zu können. Das Labor verfügt über eine Vielzahl von Sensoren (GNSS-Empfänger, INS, terrestrische Funkverfahren) und Testumgebungen bzw. -Trajektorien, welche für unterschiedliche Forschungsvorhaben herangezogen werden. In den letzten Jahren konnte die Gruppe damit ihre Expertise in den Bereichen der robusten, präzisen und zuverlässigen Positionsbestimmung und Navigationslösungen in zahlreichen Forschungs- und Entwicklungsprojekten erfolgreich vertiefen und erweitern.
Eva Reitbauer und Philipp Berglez,
Institut für Geodäsie, AG für Navigation, Technische Universität Graz | ifg.tugraz.at